Design Optimization of Wire Arrangement
with Variable Relay Points in Numerical Simulation
for Tendon-driven Robots
Robotics and Automation Letters (RA-L)
- Kento Kawaharazuka
- Shunnosuke Yoshimura
- Temma Suzuki
- Kei Okada
- Masayuki Inaba
-
JSK Robotics Laboratory, The University of Tokyo, Japan
Robotics and Automation Letters (RA-L)
- Kento Kawaharazuka
- Shunnosuke Yoshimura
- Temma Suzuki
- Kei Okada
- Masayuki Inaba
- JSK Robotics Laboratory, The University of Tokyo, Japan
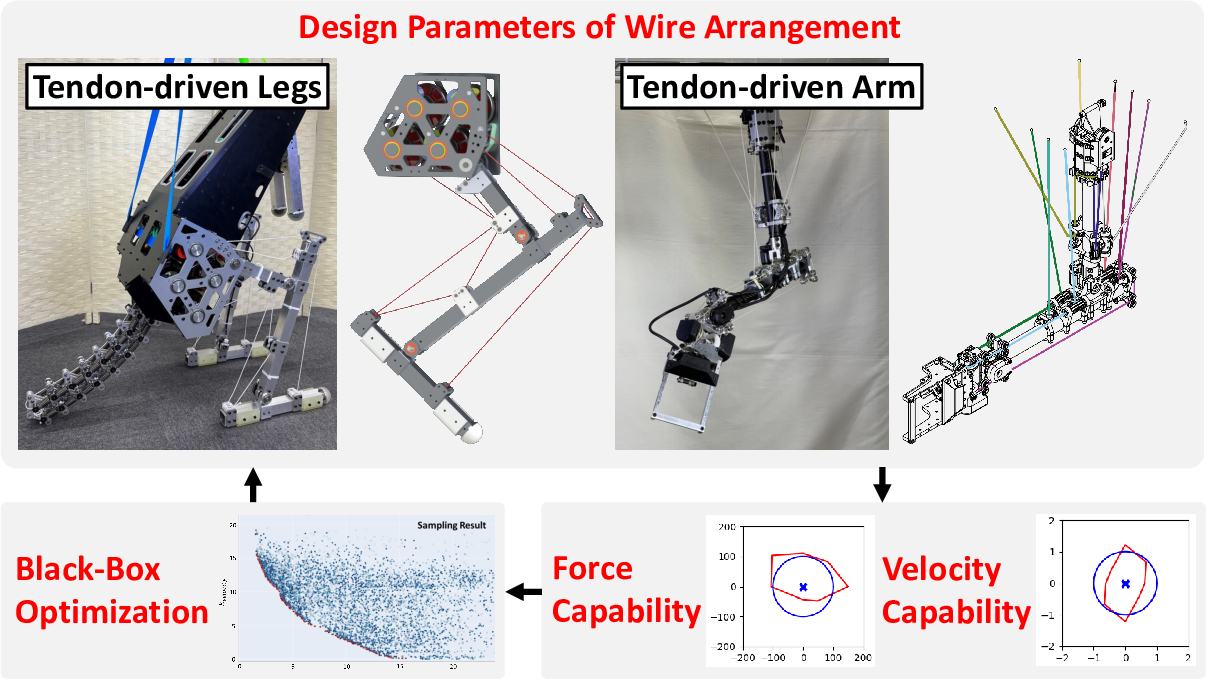
One of the most important features of tendon-driven robots is the ease of wire arrangement and the degree of freedom it affords, enabling the construction of a body that satisfies the desired characteristics by modifying the wire arrangement. Various wire arrangement optimization methods have been proposed, but they have simplified the configuration by assuming that the moment arm of wires to joints are constant, or by disregarding wire arrangements that span multiple joints and include relay points. In this study, we formulate a more flexible wire arrangement optimization problem in which each wire is represented by a start point, multiple relay points, and an end point, and achieve the desired physical performance based on black-box optimization. We consider a multi-objective optimization which simultaneously takes into account both the feasible operational force space and velocity space, and discuss the optimization results obtained from various configurations.
Design Optimization of Wire Arrangement with Variable Relay Points
we propose a wire arrangement design optimization method that takes into account variable relay points. We perform multi-objective black-box optimization by setting the realization of target operational force and velocity spaces as objective functions.
Motions of Tendon-driven Robots
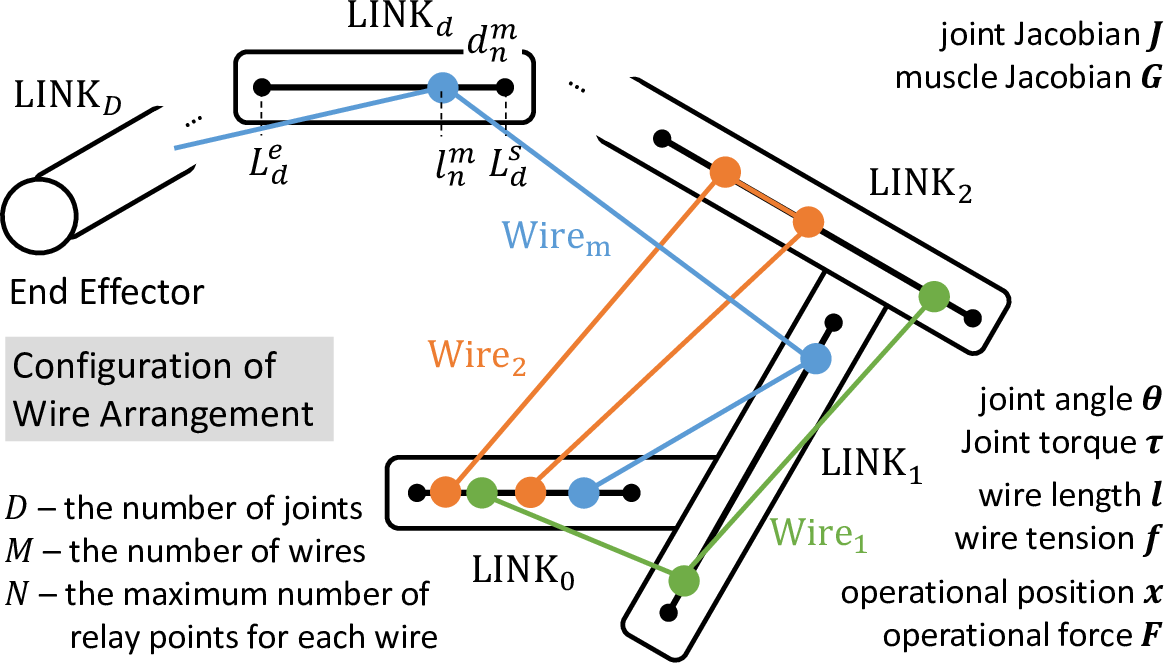
Design Parameters of Wire Arrangement
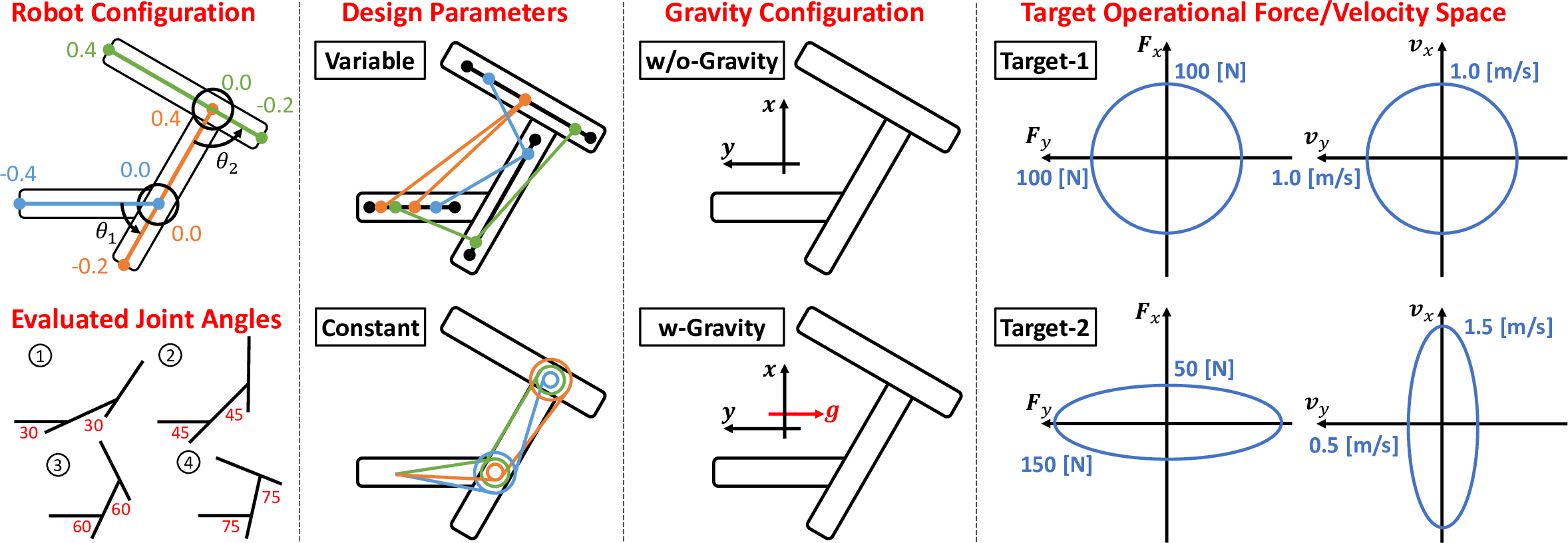
We set up a problem in which each wire can freely choose which position of each link it passes through.
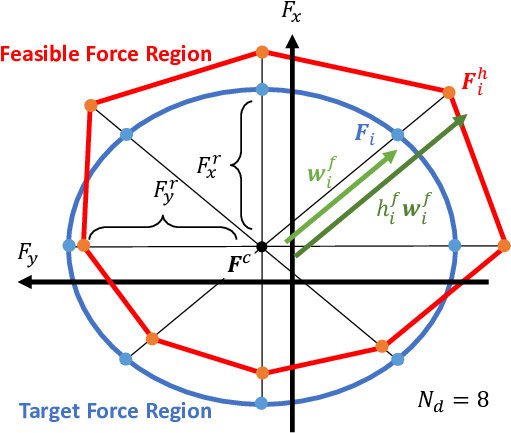
Calculation of Objective Functions
In this study, we use feasible operational force space (OFS) and operational velocity space (OVS) as the objective functions. We define the target OFS and OVS, and find design solutions that realize them as much as possible.
Experimental Setup
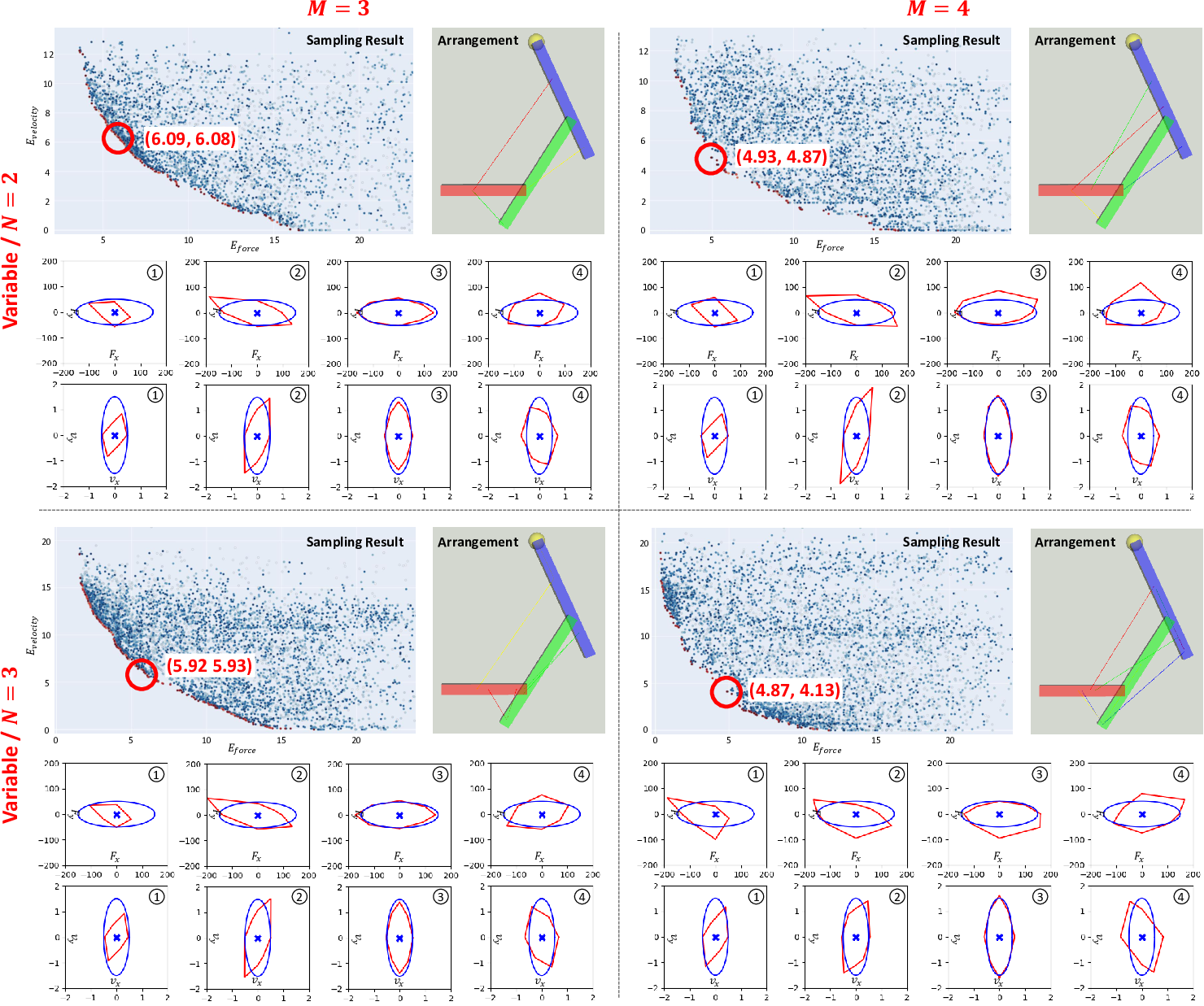
The robot configuration and the evaluated joint angles are shown. The design parameters were changed to Variable or Constant, gravity configuration to w/o-Gravity or w-Gravity, and target operational force / velocity space to Target-1 or Target-2.
Simulation Experiments
Experiment of Target-1 w/o Gravity
By increasing the number of wires, the performance becomes better. By increasing the number of relay points, the performance becomes better. The performance of Variable is betterh than that of Constant.
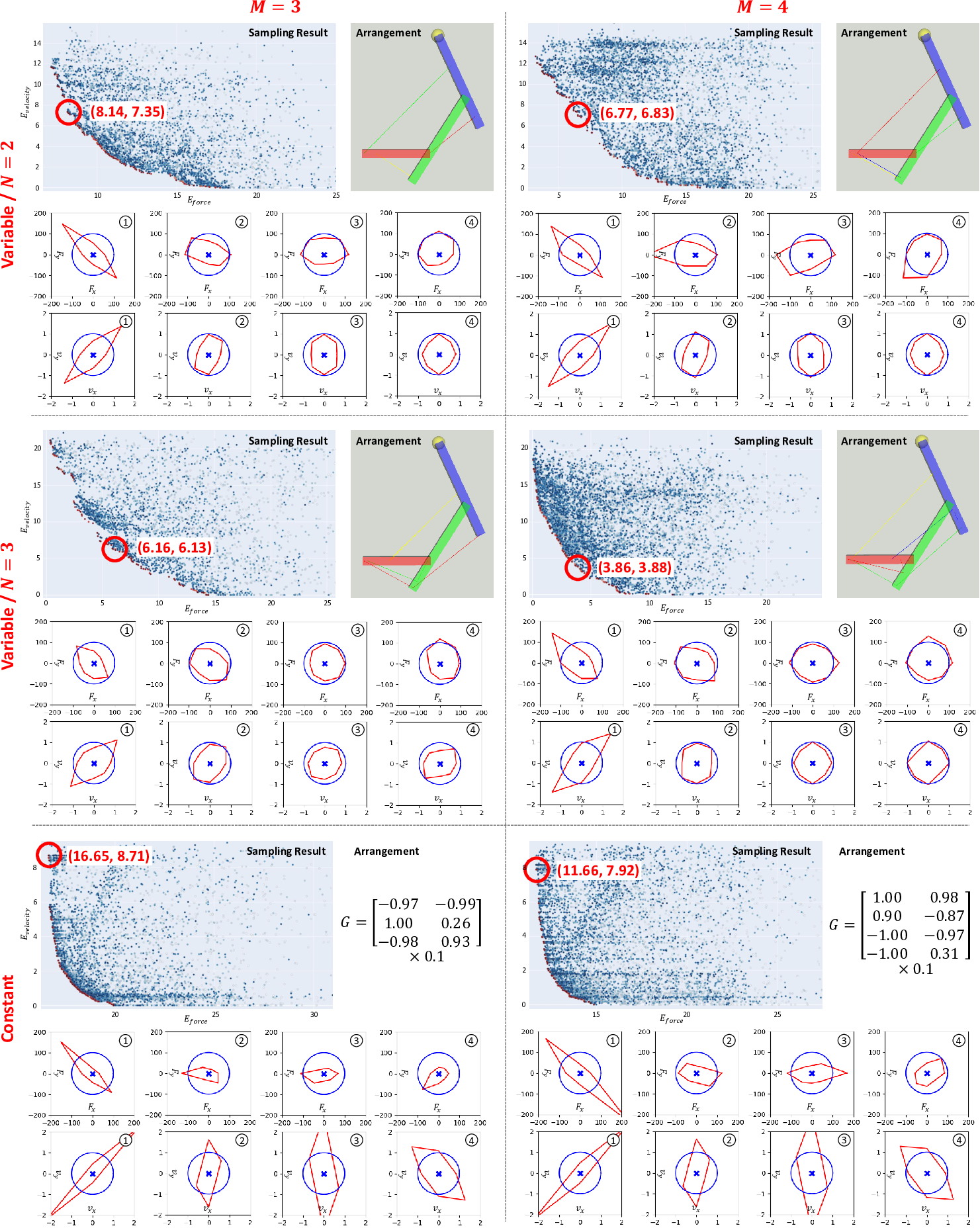
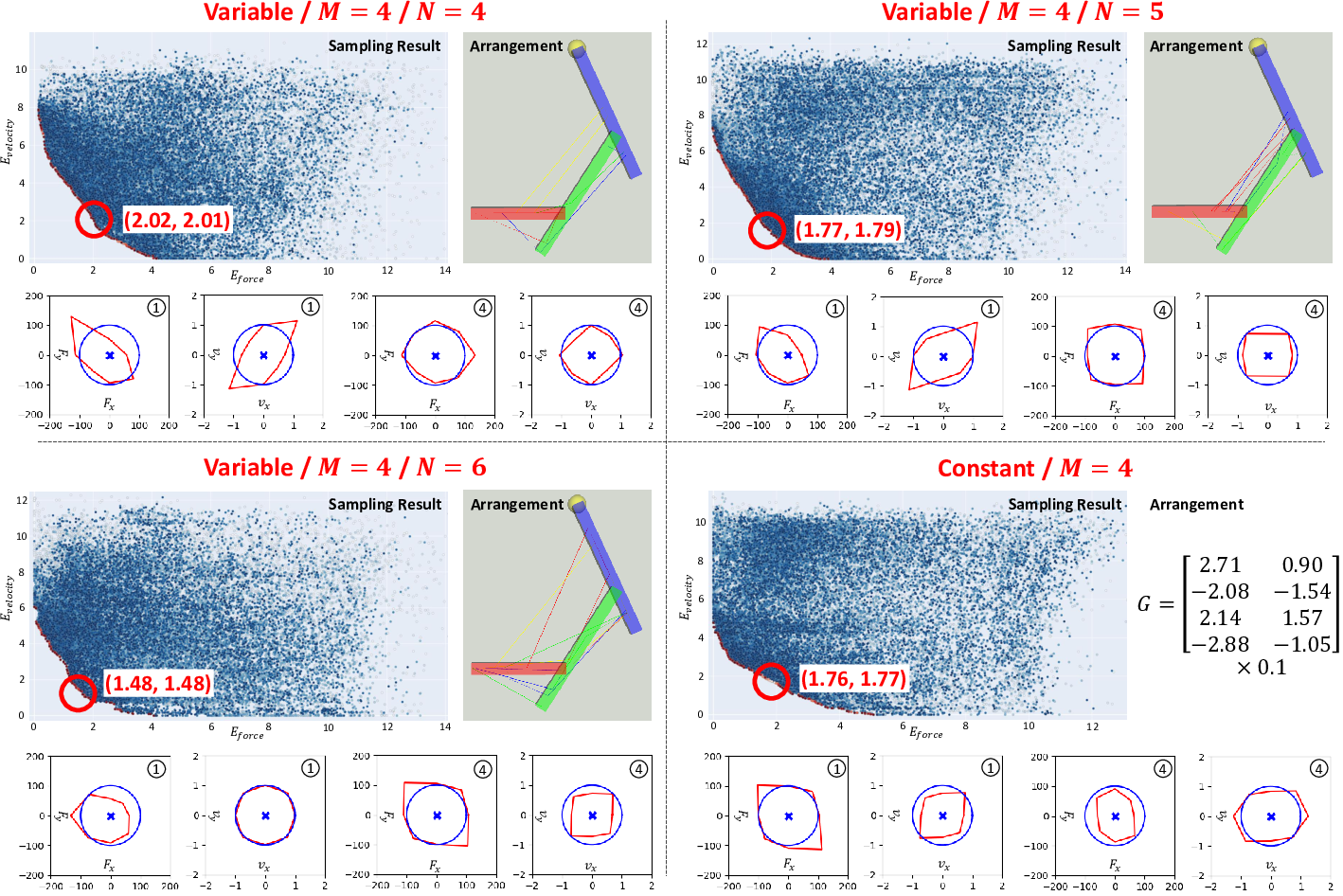
Detailed Experiment of Constant without Restrictions
For Constant, performance without restrictions is much higher than that with restrictions. For Variable, by increasing N, we can obtain higher performance than that of Constant.
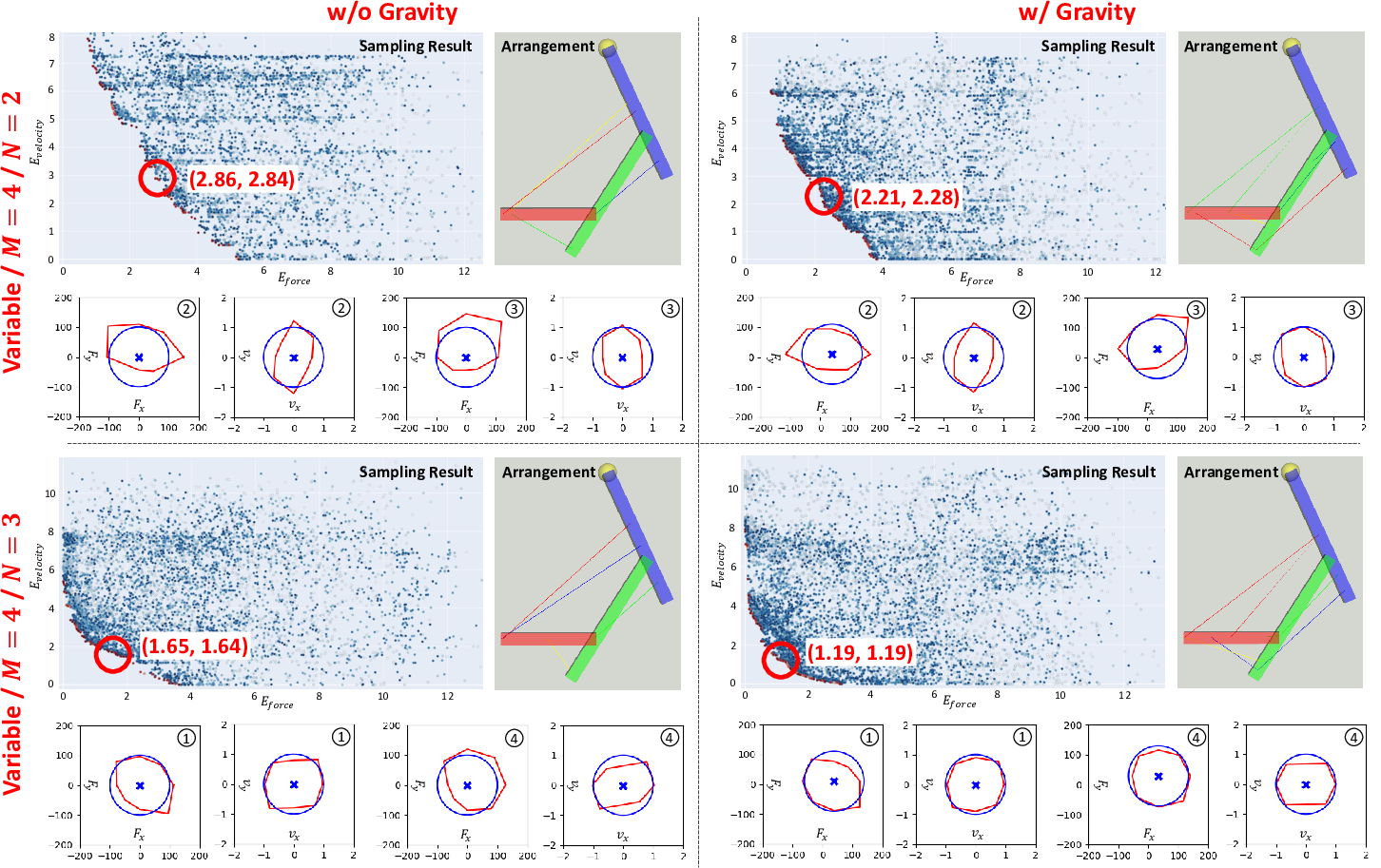
Experiment of Target-1 w/ Gravity
With the presence of gravity, the performance becomes better. The wire drive can produce anisotropic torque depending on the direction of joint rotation, and so gravity can be used effectively in many cases.
Experiment of Target-2 w/o Gravity
By increasing the number of wires, the performance becomes better. However, the characteristics of the performance are different from those of Target-1.
Bibtex
@article{kawaharazuka2024arrangeopt,
author={Kento Kawaharazuka and Shunnosuke Yoshimura and Temma Suzuki and Kei Okada and Masayuki Inaba},
title={{Design Optimization of Wire Arrangement With Variable Relay Points in Numerical Simulation for Tendon-Driven Robots}},
journal={IEEE Robotics and Automation Letters (RA-L)},
volume={9},
number={2},
pages={1388--1395},
year=2024,
}
Contact
If you have any questions, please feel free to contact Kento Kawaharazuka.