Daily Assistive Modular Robot Design
Based on Multi-Objective Black-Box Optimization
IROS 2023
- Kento Kawaharazuka
- Tasuku Makabe
- Kei Okada
- Masayuki Inaba
-
JSK Robotics Laboratory, The University of Tokyo, Japan
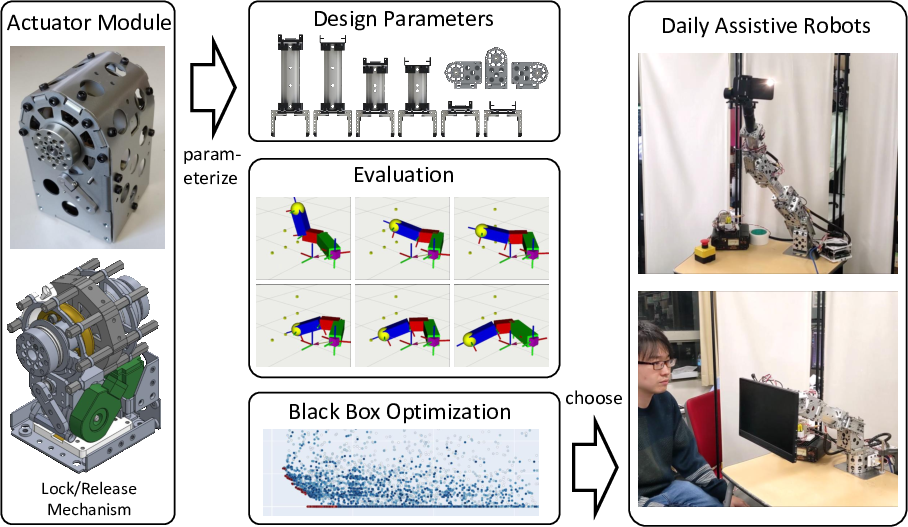
The range of robot activities is expanding from industries with fixed environments to diverse and changing environments, such as nursing care support and daily life support. In particular, autonomous construction of robots that are personalized for each user and task is required. Therefore, we develop an actuator module that can be reconfigured to various link configurations, can carry heavy objects using a locking mechanism, and can be easily operated by human teaching using a releasing mechanism. Given multiple target coordinates, a modular robot configuration that satisfies these coordinates and minimizes the required torque is automatically generated by Tree-structured Parzen Estimator (TPE), a type of black-box optimization. Based on the obtained results, we show that the robot can be reconfigured to perform various functions such as moving monitors and lights, serving food, and so on.
Concept of Automatic Design of Modular Robots
We propose a method of automatic design optimization of robots with actuator modules with a lock-release mechanism through multi-objective black-box optimization.
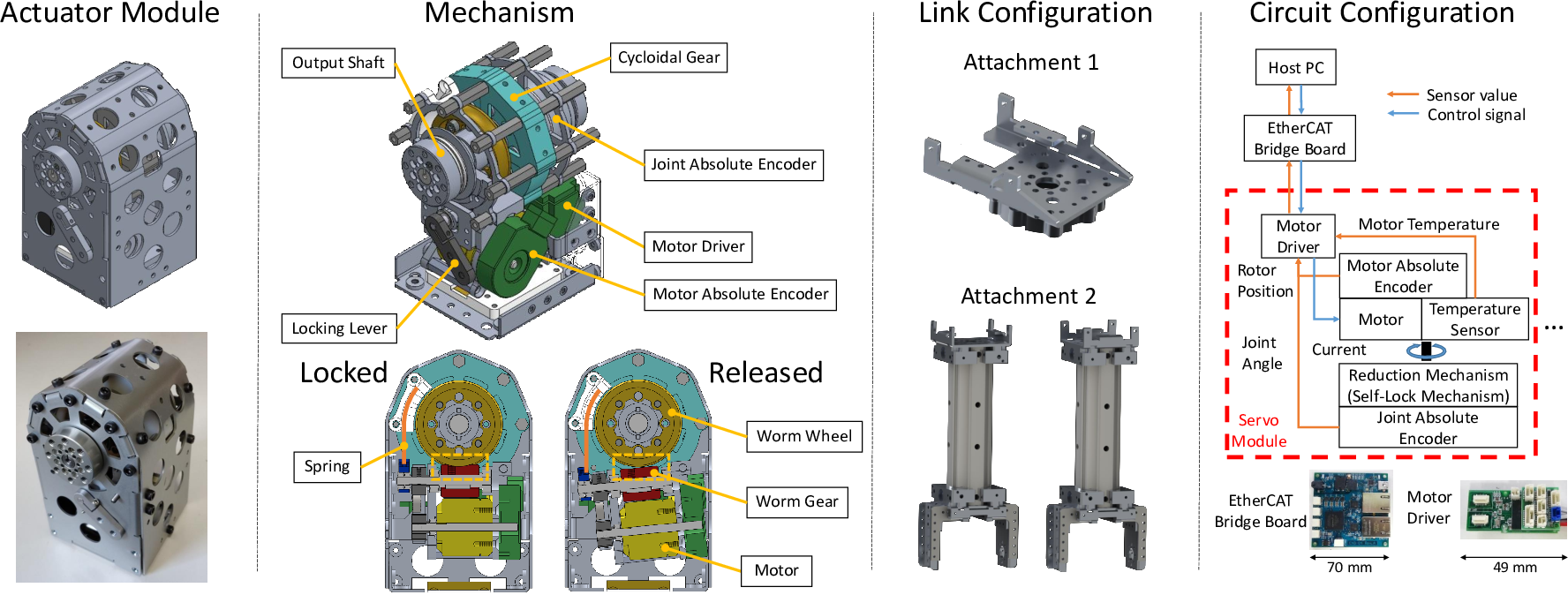
Actuator Module Design
The modular actuator design with a lock-release mechanism. This module includes a worm gear and cycloidal gear that can switch between locked and released states by a locking lever. By using two joint attachments, various kinematic configurations can be generated.
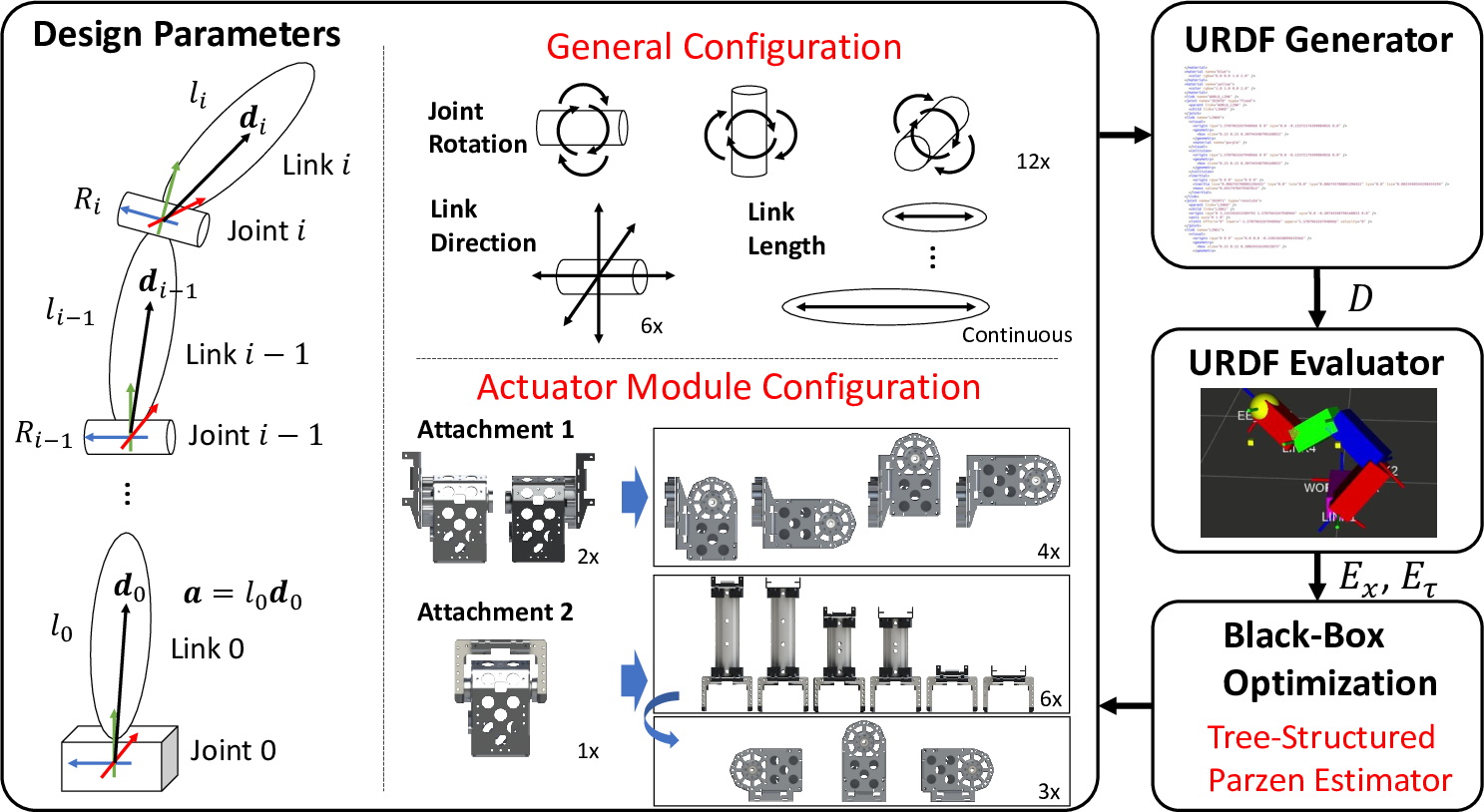
System Overview
We prepare different design parameters for general configuration and actuator module configuration, generate a URDF model automatically, evaluate it, and optimize the design parameters through Tree-Structured Parzen Estimator.
Simulation Experiments
The target positions to be realized for general configuration.
Actual Robot Experiments
The target positions to be realized for actuator module configuration.
Bibtex
@inproceedings{kawaharazuka2023autodesign,
title={Daily Assistive Modular Robot Design Based on Multi-Objective Black-Box Optimization},
author={Kento Kawaharazuka and Tasuku Makabe and Kei Okada and Masayuki Inaba},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2023},
}
Contact
If you have any questions, please feel free to contact Kento Kawaharazuka.